Operating systems - Interrupts
Table of Contents
Once I have created a Kernel with subsequent print() methods and the GDT, my next step in creating a OS is to implement Interrupts. We are going to enable Interrupts and write a keyboard interrupt handler for my learning-purposes OS called Rose-OS.
This document is a resume of this OSDEV wiki article, this osdever article and the Intel i386 processor manual.
But, What are Interrupts?
Interrupts are signals from a devices to the CPU. They are used to tell the CPU to stop the process it is executing and immediately switch to something else.
To put a specific example, when a keyboard key is pressed, a specific memory address in the processor is activated. This is represented by a table provided by the OS called the IDT (Interrupt Descriptor Table) and jumps to the code the entry points to. This code is called ISR (Interrupt Service Routine) or Interrupt Handler. Types of Exceptions
There are generally 3 different types of interrupts:
- Exceptions: Generated internally by the CPU; Used to alert the Kernel of an event or situation that needs attention.
- IRQ (Interrupt ReQuests): Interrupt generated externally by the chipset. There are two types: Pin-based and Message based.
- Software Interrupt: Interrupt signaled by software indicating to the Kernel it needs the Kernel’s attention.
Interrupts, from start to end
The CPU checks the PIC pin for a interrupt every time it completes a instruction.
- Keyboard key is pressed
- Keyboard controller tells a device (PIC Programmable Interrupt Controller) to cause a interrupt
- IRQ #1 is sent to the PIC
- PIC decides whether the CPU should be immediately notified of the IRQ
- PIC converts the IRQ into a interrupt vector (Number between 0 and 255) for the CPU’s table
- The PIC has notified an interrupt, so the CPU stores some state information on the stack and jumps to the address pointed to by the IDT
- The code pointed to by the IDT handles the interrupt (Via the Interrupt Handler, setup in advance by the OS) by interacting with the keyboard via
in/outinstructions - Once the code has finished interacting with the device, it executes a
iretcommand, to re-set the state the processor was in before the interrupt was handled.
Enabling Interrupts
The first 32 interrupts are reserved by the processor, these are showed in the table below:
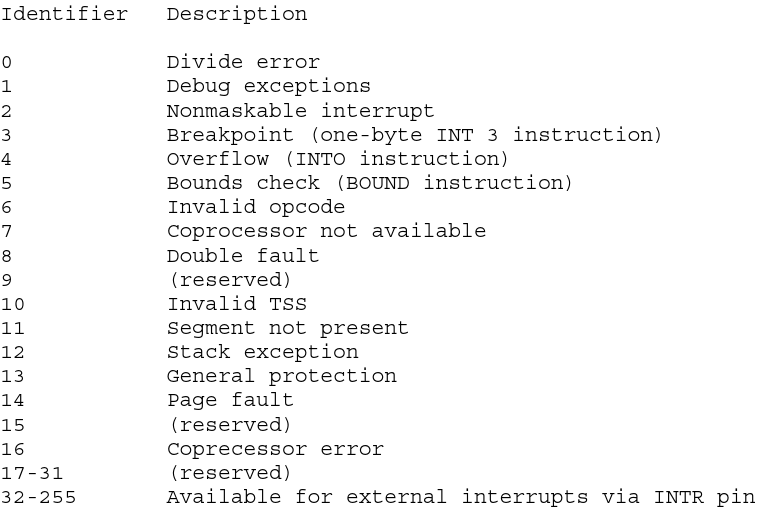
Interrupt and exception ID assignments
We can manage the interrupts from 32 to 255. We only have 16 interrupt pins available to us by the processor. These pins are located in the two PIC (Programmable Interrupt Controllers) and are read based on priority. The highest priority interrupt is IRQ0 and the lowest priority is interrupt IRQ7. This is due to the IRQ2, or cascade interrupt, which is used to read interrupts IRQ8-IRQ15 from slave PIC.
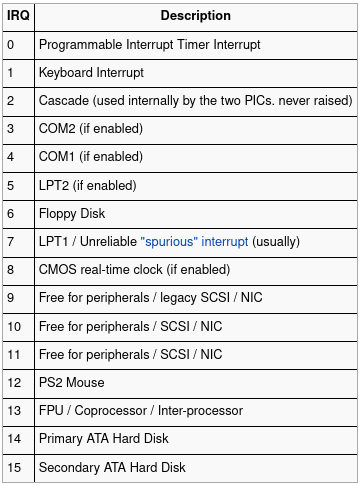
So the order of the IRQ priority goes like this:
IRQ0, IRQ1, IRQ8, IRQ9, IRQ10, IRQ11, IRQ12, IRQ13, IRQ14, IRQ15, IRQ3, IRQ4, IRQ5, IRQ6, IRQ7
Knowing this, we have to map each interrupt to its interrupt handler, so we will have 16 interrupt handlers.
In this example, we will see the keyboard interrupt handler, given that it’s the one we are going to write the actual handler function for.
As always, we start from our main function. Note we are going to load interrupts, print a welcome message, and start a endless loop.
If Interrupts weren’t working, we could not manage our system once the program flow enters the loop.
// Kernel/kernel.c
#include "../drivers/screen.h"
#include "idt.h"
void main(){
// Load Interrupts
idt_init();
// With this meesage, what I am trying to acheve is to debug method handle_scrolling.
print("Welcome to Rose-OS\n");
// Check weather interrupts are in place or not
while(1){}
}
Here, we have defined a interrupt entry structure:
// kernel/idt.h
struct idt_entry {
unsigned short int offset_lowerbits;
unsigned short int selector; // Kernel segment goes here
unsigned char zero; // Always zero
unsigned char type_attr; // Flags set using the table
unsigned short int offset_higherbits;
} __attribute__ ((packed));
struct idt_ptr {
unsigned short limit;
unsigned int base;
} __attribute__ ((packed));
And we create a array for 256 entries, creating a interrupt vector. We are going to create the definitions of some external methods (irq0) written in asm and their addresses (irq0address) to fill in the IDT correctly in the linkage phase. This way, we are populating the IDT with the address of the external interrupt handler method (programmed in asm) that, in turn, calls a IRQ handler function for each interrupt (written in C).
// idt_init() method on kernel/idt.c
void idt_init(){
struct idt_entry IDT[IDT_SIZE];
extern int load_idt();
// Keyboard Interrupt Handler method
// written in /boot/irq.asm
extern int irq1();
// The address of the asm method, to populate the idt_entry vector number 33.
unsigned long irq1_address;
// Initialize the PIC chips
// The specific code can be found in my github repo
// Not necessary for this overview
// Populating the idt_entry vector for the keyboard interrupt
irq1_address = (unsigned long)irq1;
IDT[33].offset_lowerbits = irq1_address & 0xffff;
IDT[33].selector = 0x08; /* KERNEL_CODE_SEGMENT_OFFSET */
IDT[33].zero = 0;
IDT[33].type_attr = 0x8e; /* INTERRUPT_GATE */
IDT[33].offset_higherbits = (irq1_address & 0xffff0000) >> 16;
// fill the IDT descriptor
idt_address = (unsigned long)IDT ;
idt_ptr[0] = (sizeof (struct idt_entry) * 256) + ((idt_address & 0xffff) << 16);
idt_ptr[1] = idt_address >> 16 ;
// Finally, call the asm method to initialize the IDT
load_idt(idt_ptr);
}
The asm method written to handle IRQ1 will be:
; section of /boot/irq.asm
irq1:
pushad
cld
call irq1_handler ; Keyboard handler
popad
iretd
For all of this to work, we have to call the asm instruction lidt with the IDT address as a parameter. We have declared this method as extern because it is written in asm. Here is the method:
load_idt:
mov edx, [esp + 4]
lidt [edx] ; Load IDT
sti ; Set interrupt flag
ret
In the above method, we are collecting the parameter passed to it through the esp register. Most importantly, we are loading the IDT table with the address of the new idt_entry vector initialized in kernel/idt.c.
Now, we have finished enabling Interrupts and assigning the interrupt table.
Writing the keyboard handler (irq1_handler())
Now, when a keyboard key is pressed, the keyboard controller sends a pulse that sets the IRQ1 pin. This is interpreted by the PIC controllers and the specific interrupt method’s memory address is looked up in the IDT. In this case, it’s the irq1 method (Implemented in boot/irq.asm) the one that gets executed. This method pushes all general purpose registers, clears the direction flags, calls the irq1_handler method (Implemented in drivers/keyboard.c), pops all the general purpose registers and restores the required parts of the EFLAGS.
irq1_handler()
This method simply calls that specific interrupt handler, in our case, the keyboard handler, and signals EOI (End Of Input acknowledgment) to the PIC’s command port. As we are writing the IRQ1 (keyboard) interrupt handler, and this is interpreted by the PIC1, we have to write the EOI byte to the pin 0x20. If we don’t signal EOI, the PIC won’t allow further Interrupt Requests.
// kernel/irq1_handlers.c
void irq1_handler(void) {
keyborad_handler();
port_byte_out(0x20, 0x20); //EOI
}
keyboard_handler()
To be able to read the pressed key from the keyboard, we have to read the keyboard’s output buffer. There, we can find the data, in hex, that corresponds to the keyboard’s key press.
We have to be careful when we read from this pin, because, once we read, it’s buffer gets erased, in preparation for the next key press. Also, we can read port 0x64, which is the status port, to get information on the 0x60 port. There is a flag, called OBF (Output Buffer Full) that indicates whether we can read from data port or not.
Once we have checked the OBF flag, and it assures us we can read from port 0x60, we can proceed with mapping the data read with the key pressed. As strange as it may seem, I defined and initialized keyboard_map in a separate .h file, but for some strange reason, when we tried to access some of it’s elements, we where returned garbage. For this reason, I decided to declare every time this code gets run, which is, in my opinion, way too inefficient and not very elegant.
// drivers/keyboard.c
void keyborad_handler(){
// Read keyboard status
const unsigned char status = port_byte_in(READ_STATUS_REGISTER);
// TODO: Why has the keyboard_map have to be here!
// I cant declare in .h and use here.
// Figure out why.
char keyboard_map[86] = {
0, 27, '1', '2', '3', '4', '5', '6', '7', '8',
'9', '0', '-', '=', '\b', '\t', 'q', 'w', 'e', 'r',
't', 'y', 'u', 'i', 'o', 'p', '[', ']', '\n', 0,
'a', 's', 'd', 'f', 'g', 'h', 'j', 'k', 'l', ';',
'\'', '`', 0, '\\', 'z', 'x', 'c', 'v', 'b', 'n',
'm', ',', '.', '/', 0, 0, 0, ' ', 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, '7', '8', '9', '-', '4', '5', '6', '+', '1',
'2', '3', '0', '.', 0, 0
};
// Bit 0: Output buffer status
//0: Output buffer empty, don't read yet.
//1: Output buffer full, can be read.
if (status & 0x01) {
const char symbol = port_byte_in(READ_OUTPUT_BUFFER);
// If interrupt keyboard data is a make (pressed key)
if (symbol < 86 && symbol > 0) {
print_c(keyboard_map[symbol]);
}
}
}
When the function gets called, we check whether it’s a key press or a key release interrupt by checking the symbol value. If it’s a key press, we print the mapped value. Conclusion
There is a lot to get our heads around in this post. There is a even greater amount of implementation to be done, at least, having a default Interrupt handler, so that an-implemented interrupts are handled gracefully. But this is the bare bones implementation of interrupts and a keyboard interrupt handler method.